
Robots that can walk!
At present, wheeled robots take a prominent place in the category of mobile robots utilized by humans. The reason behind this dominance is because of the high speed, simple locomotion mechanism and the low-cost build of the wheeled robots. However, it should be noted that in order to move, wheeled robots require continuous paved surfaces. Furthermore, they can’t navigate well over obstacles and terrains such as rocky terrains, surfaces with low friction, etc., which is one of the main drawbacks identified in wheel robots. Addressing the mentioned drawbacks with many other advantages, legged robots were introduced. Legged robots are capable of traversing on any kind of surface and they even have the possibility to step over obstacles if needed. Legged robots can be categorized using the number of limbs they comprise of. Such few categories are mentioned below.
1 - Monopod Robots
Monopod robots only consist of a single-leg and are also referred to as one-legged robots. They are generally designed to work in a hopping behavior and they balance themselves by changing their center of gravity while performing hops.
One legged jumping robot
2 - Biped Robots
Two-legged robots or biped robots consist of two legs and their development is mainly aligned with Humanoid robots which are designed to imitate human behavior. Biped robots are dynamically stable but require highly complex algorithms to control and maintain the balance. Some famous biped robots we can see in the modern world are; Boston Dynamic’s Atlas, Honda’s ASIMO, and Toyota’s T-HR3.
.jpg)
Toyota’s T-HR3
.jpg)
Boston Dynamic’s Atlas
.jpg)
Honda’s ASIMO
3 - Multi-legged Robots
Multi-legged robots encompass all the robots which consist of more than 2 legs. Among them, special attention and focus have been given towards the Quadruped robots which have four legs, and Hexapod robots which have six legs.
3a. Quadruped Robots
Quadruped robots are one of the most popular types in the legged robot world. They have high static stability and are commonly designed to walk in 2 different walking patterns.
1. Moving one leg at a time
2. Moving alternative leg pairs

SPOT quadruped robot
3b. Hexapod Robots
These spider-shaped robots are also a biologically inspired robot type that consists of six legs. As they have six legs they have greater static stability when standing, as well as higher dynamic stability when moving. Using their extra legs these hexapods can easily manipulate objects in the surrounding environment which is known in the scientific community as legipulation. Different walking gaits or walking patterns have been implemented in hexapods for proper navigation and are currently a famous topic in the legged robotics research community. From here onwards we will focus on Hexapod robots and their behavior.

CSIRO's ZEE hexapod
Hexapods’ legs can take several configurations like 3 Degrees of Freedom (DoF) and 5 DoF depending on the requirement. For easier comprehension, let’s take a look at a 3 DoF leg of a hexapod.
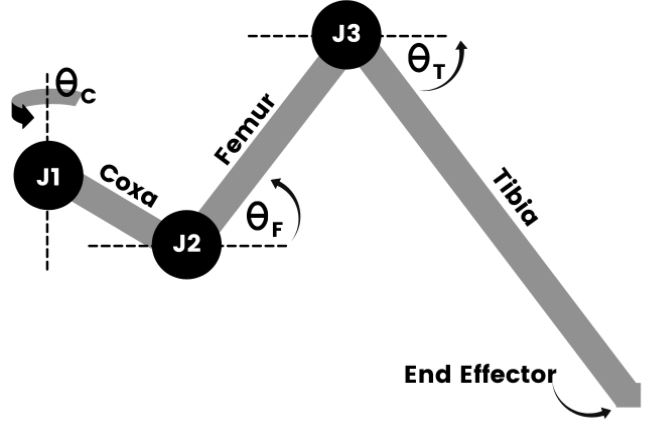
Side view of a 3 DoF leg
By looking at the figure, we can identify that there are 3 links named Coxa, Femur, and Tibia. Coxa joint(J1) is attached to the body of the hexapod and can rotate around a vertical axis while the other two joints (J2, J3) can rotate around a horizontal axis. By varying the joint angles of these 3 joints which are 𝚹C, 𝚹F, and 𝚹T the hexapod can move its leg from one place to another and perform navigation or any other activity.
Knowledge in robot kinematics plays an essential factor in describing the end effector’s position and orientation. Robot kinematics is about studying all possible motions that can be achieved using a robot. Kinematics can be divided into two categories which are forward kinematics and inverse kinematics. Forward kinematics will help us to identify the end effectors’ resultant position and orientation when we are given the joint angles. On the other hand, inverse kinematics will help us to obtain the joint values when the end effector’s position and orientation are given. Forward kinematics will give you one unique solution while inverse kinematics can result in multiple solutions. In the real world, the most used kinematic type is inverse kinematics which is also the more complex one to solve.
Walking patterns in legged robots are known as gaits. Some of the famous walking gaits used in Hexapods are summarized below. Before looking into them it is important to discuss the two stages of the walking of a legged robot; which are the stance phase and swing phase. In the swing phase, the leg traverses from an initial position to a goal position through the air while in the stance phase the leg endpoint is contacted with the ground.
1. Wave gait - In the wave gait, only 1 leg is in the swing phase while the other 5 legs are at the stance phase. Therefore, this is the slowest gait pattern.
2. Ripple gait - In the ripple gait, two legs from the opposite sides are in the swing phase with a 180 degree offset while the other 4 legs are in the stance phase. This gait is faster than the wave gait since two legs are moving at a time.
3.Tripod gait - In tripod gait, three legs are at the swinging phase while the other 3 legs are at the stance phase. Initially, the
front and rear leg of one side and the middle leg of the other side of the hexapod will be moved while the other three legs are in contact with the ground.
When the moving legs reach their goal positions other 3 legs will start moving while the previously moved legs will now be in contact with the ground.
Boston Dynamics, NASA, CSIRO’s Robotics and Autonomous Systems Group, ANYbotics, Agility Robotics, and PAL Robotics are some of the most famous and leading companies in the world that carryout legged robot-related research. Even though the design and the controlling complexity of legged robots remain as challenges, it is safe to assume that it will be a common sight to see lots of legged robots in various applications in the near future due to the inherent advantages they provide.